
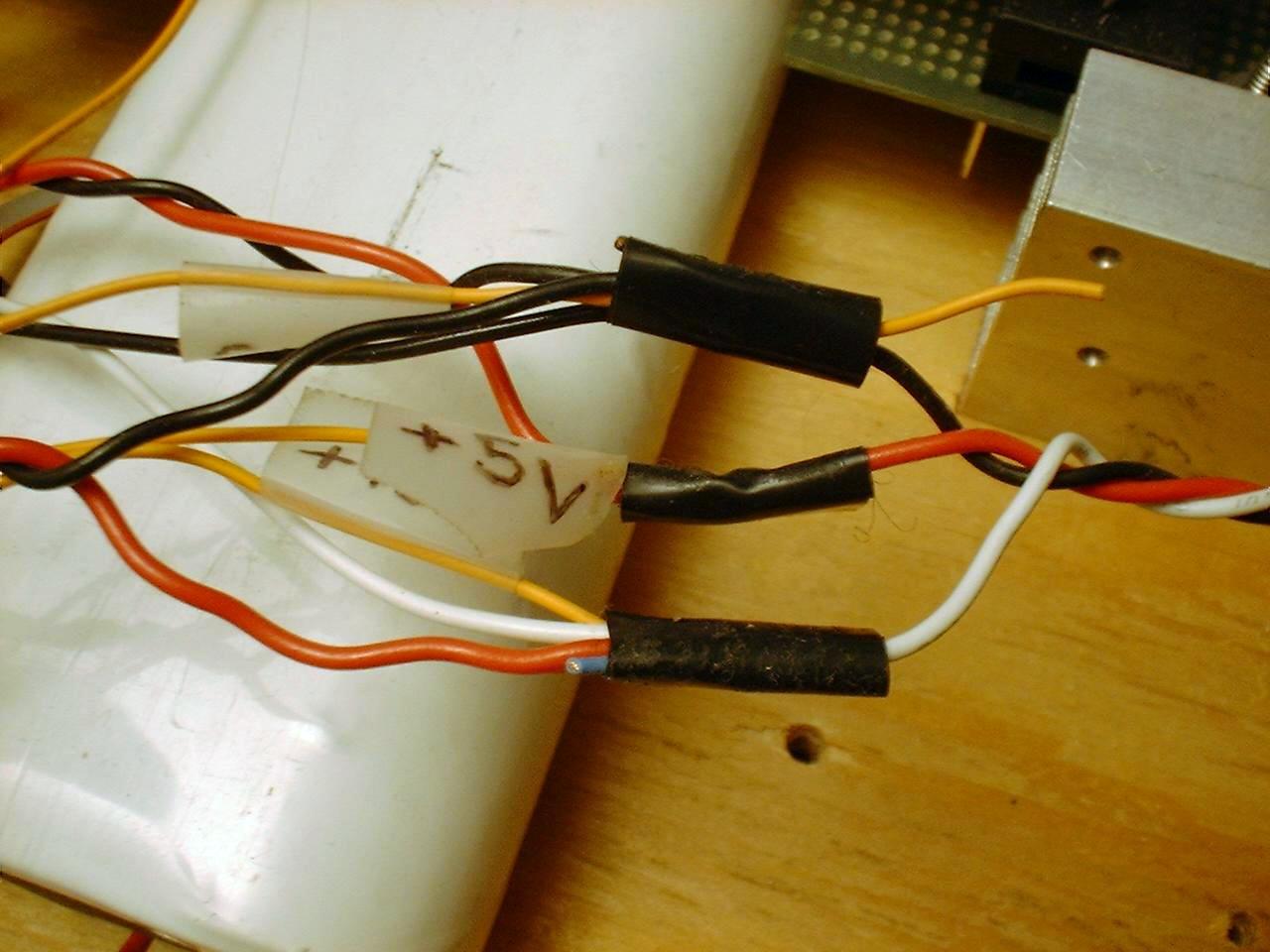
Two examples of the wrong way to do it.
This page started on 12/30/00 and last updated 12/30/00
Index | Next
Connection Techniques
I have built lots off things that turn into a real rats nest. I would need one thing connected to my power source so I just solder a wire to the positive side and another wire to the ground side. As Chef Tell would say "Very simple, very easy". Then I needed a second device so I soldered those wires on. It's still not bad, yet... Or you can just tiwst the wires together, solder them and cover it with tape...
As you add more devices it becomes a real problem!
The picture on the left shows multiple wires soldered to a common point. It's not obvious from this picture but one of the red wires is soldered to another common point on the back of the board. And it has another 2 or 3 wires soldered to it.
Both photos show examples of multiple wires soldered together and covered with tape.
Connections will generally fall into one of two catagories:
I will present different methods to make these connections.
Visit Twin Cities Robotics Group
Back to my Home Page http://www.pobox.com/~jsampson
This page is currently maintained by Jeff Sampson