Back to Index
Click thumbnails for a larger view.
Using RoboRealm to follow row crops
This is a series of experiments with RoboRealm. Bob has a strawberry farm and wants automated equipment to drive autonomosly (at least steering) down a row.
Using Floor Finder
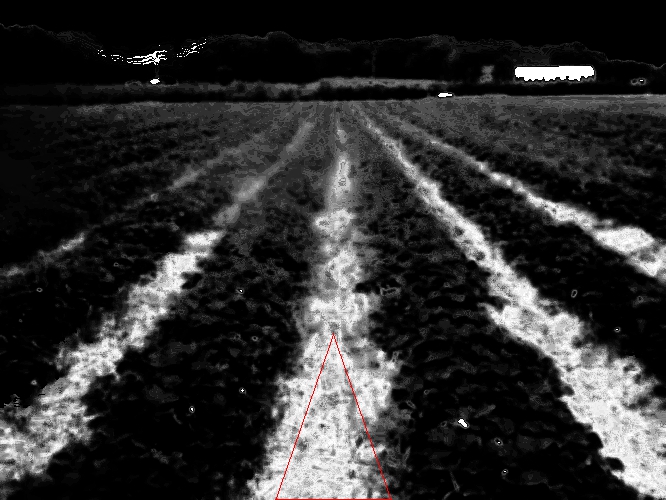
This image has way too much ground exposed.
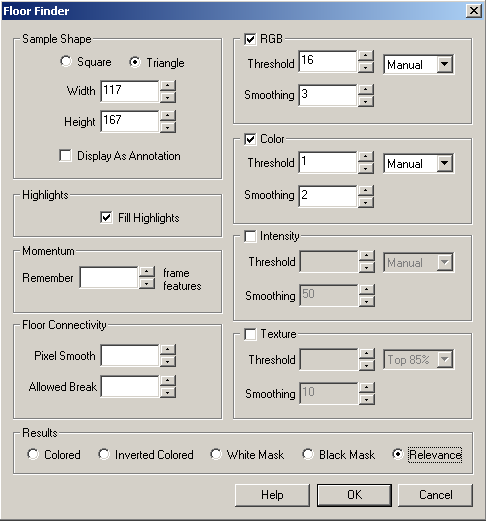
This image uses a triangle to mask off the area of interest.
The following explains the steps to recreate this experiment. Here is the code to load: test5anew.robo
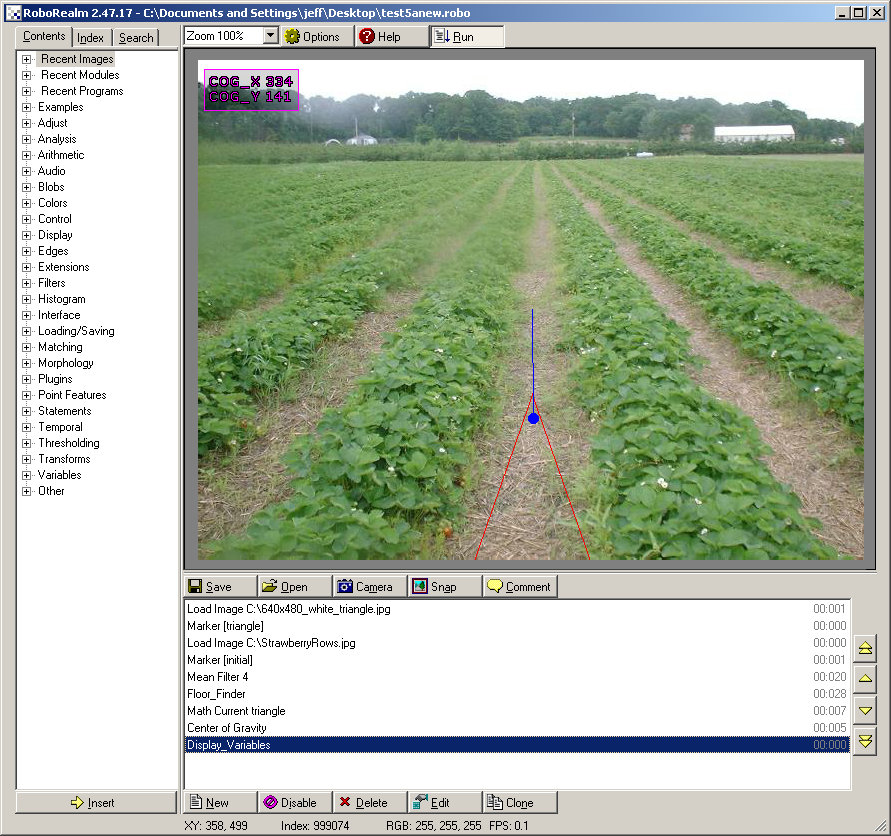
This is the list of steps.
Load the triangle image. This leaves this image as CURRENT. I added a MARKER to make a background copy of the image.
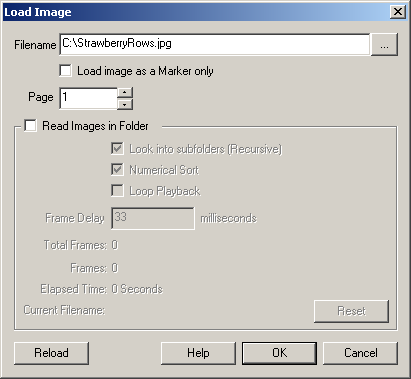
Load the actual image and it becomes CURRENT. (I only has a still image to work with.) I added a MARKER to make a background copy of the image to use later.

Next we run a Mean filter to blur the image.

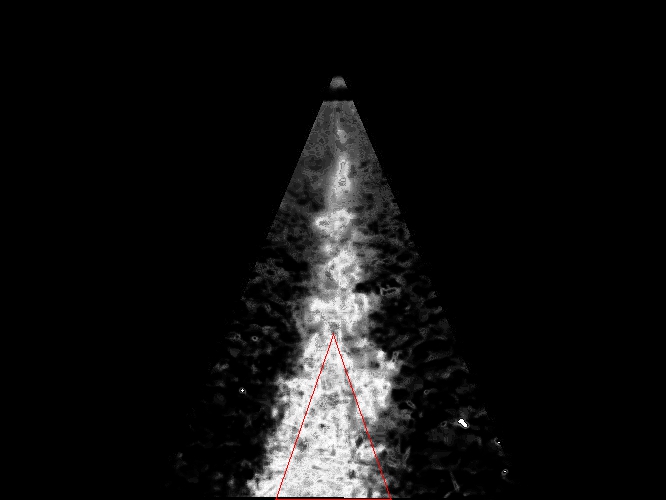
Then run floor finder to isolate the ground.
Now we add a Math step to logically AND the triangle and the floor result.

Now we run Center Of Gravity to get the center of the floor blob. The Display_Variables just puts the numbers on the screen so we can see them.
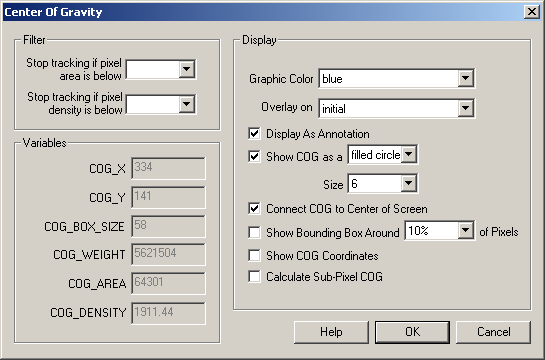

The COG numbers can now be extracted various ways to control something.
Back to Index
My home page http://tcrobots.org/members/jsamp.htm
Visit Twin Cities Robotics Group
This page is currently maintained by Jeff Sampson