Click this schematic for the big view.
This page started on 01/17/01 and last updated 02/12/01
My Motor Controller Project
Note: The charge pump diodes need to be fast recovery diodes. I used 1N4004 diodes in the schematic because I was too lazy to rename them before I created this page. I will also probably change the control logic before I actually get this to run.
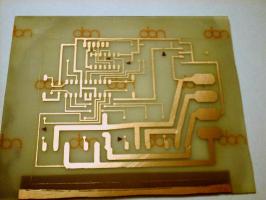
Click here to see backlit view of the board. You can see it is marginal. But it took me all day to make it, so I am going to use it anyway.
Update 02/12/01 - Dual motor controller module
I decided the traces on the PC board weren't large enough for the motor power. So I am going to use actual wires to connect the MOSFETs. This is a picture of the drilled heatsink with the terminal strip, current sense resistors and MOSFETs. There are only two MOSFETs in the picture but there eventually will be eight total.
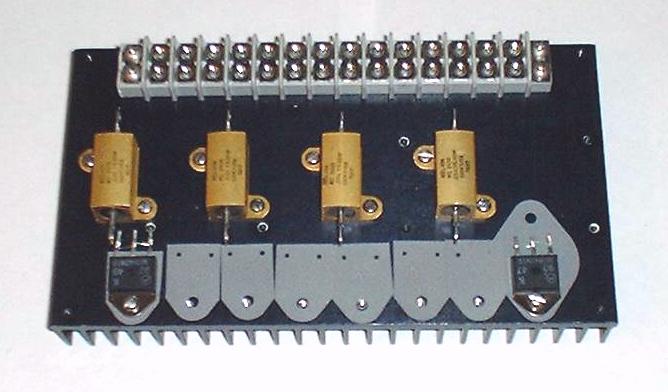
I used TO-3 SilPads and cut them down to fit. Simply because ABC Electronics has them for $.05 and Digikey wants $.85 for the TO-218 SilPads.
I will attach a PC board or perf board with standoffs which will have the MOSFET driver electronics.
Update 02/13/01 - I have added some wires but haven't solder them to the FETs yet.

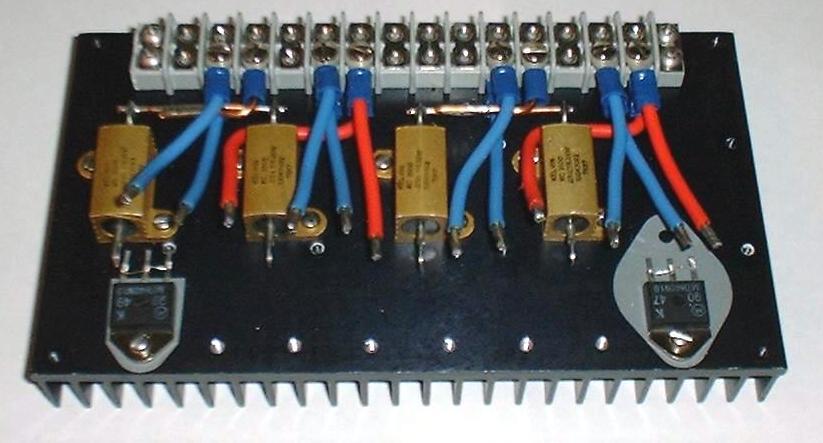

I've added some 12 gauge wires to the dual motor driver module. The wire is from a local auto parts store. Turns out 12 gauge wire is pretty stiff to work with. The ground bus bar is 12 gauge solid wire. (Romex house wiring)
I was rather pleased when I went to solder the 12 gauge stranded wire. The insulation didn't melt! That can be a big problem with a wire you haven't used before.
The next step will be to bolt down the FETs and solder the wires to the FETs. I will also add twisted pair cable from the gate and source of each FET to be connected to the controller board. I will add heatshrink tubing over each FET lead after it is soldered. Except for the source leads which connect directly to the current sense resistors.
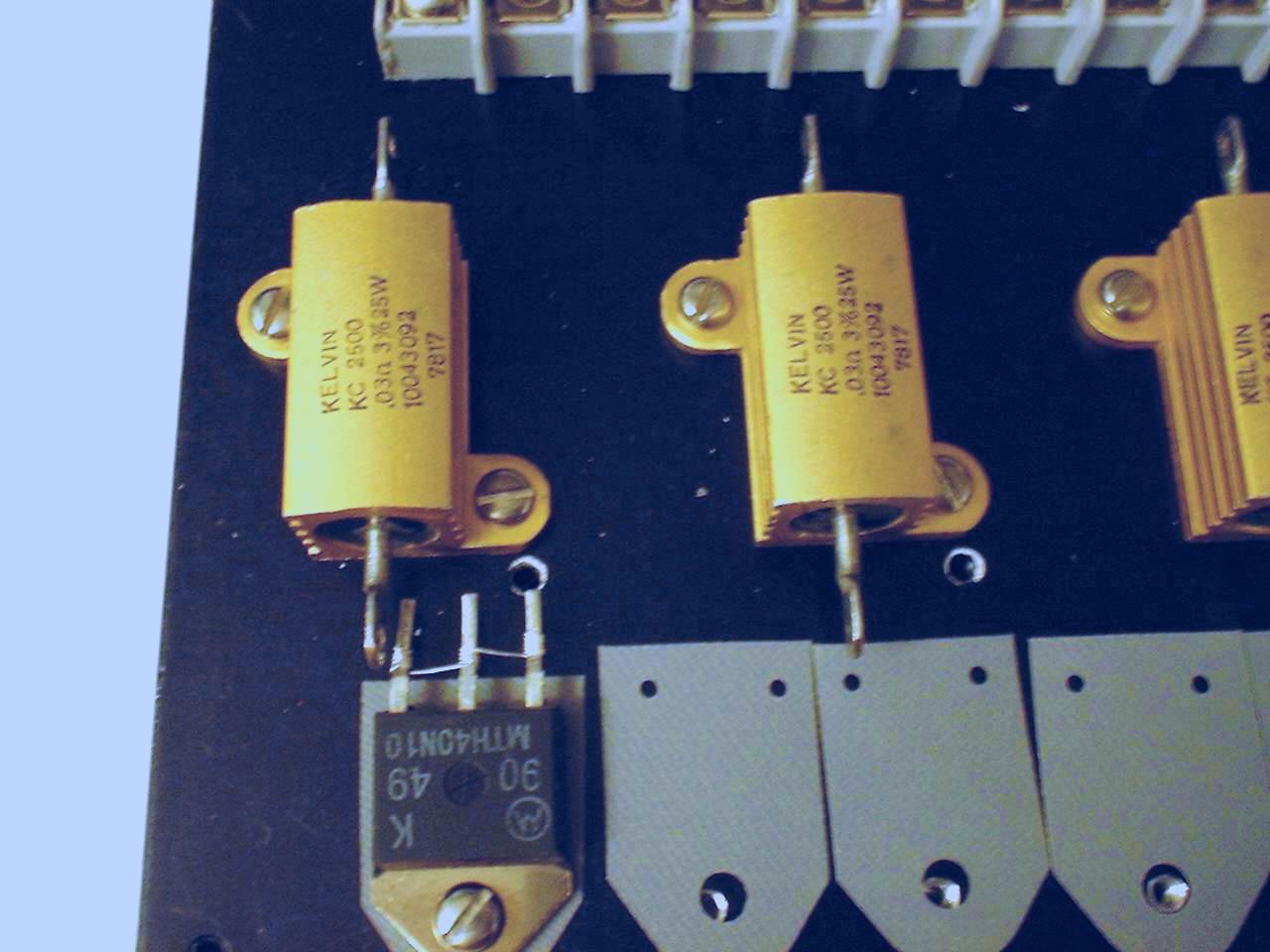
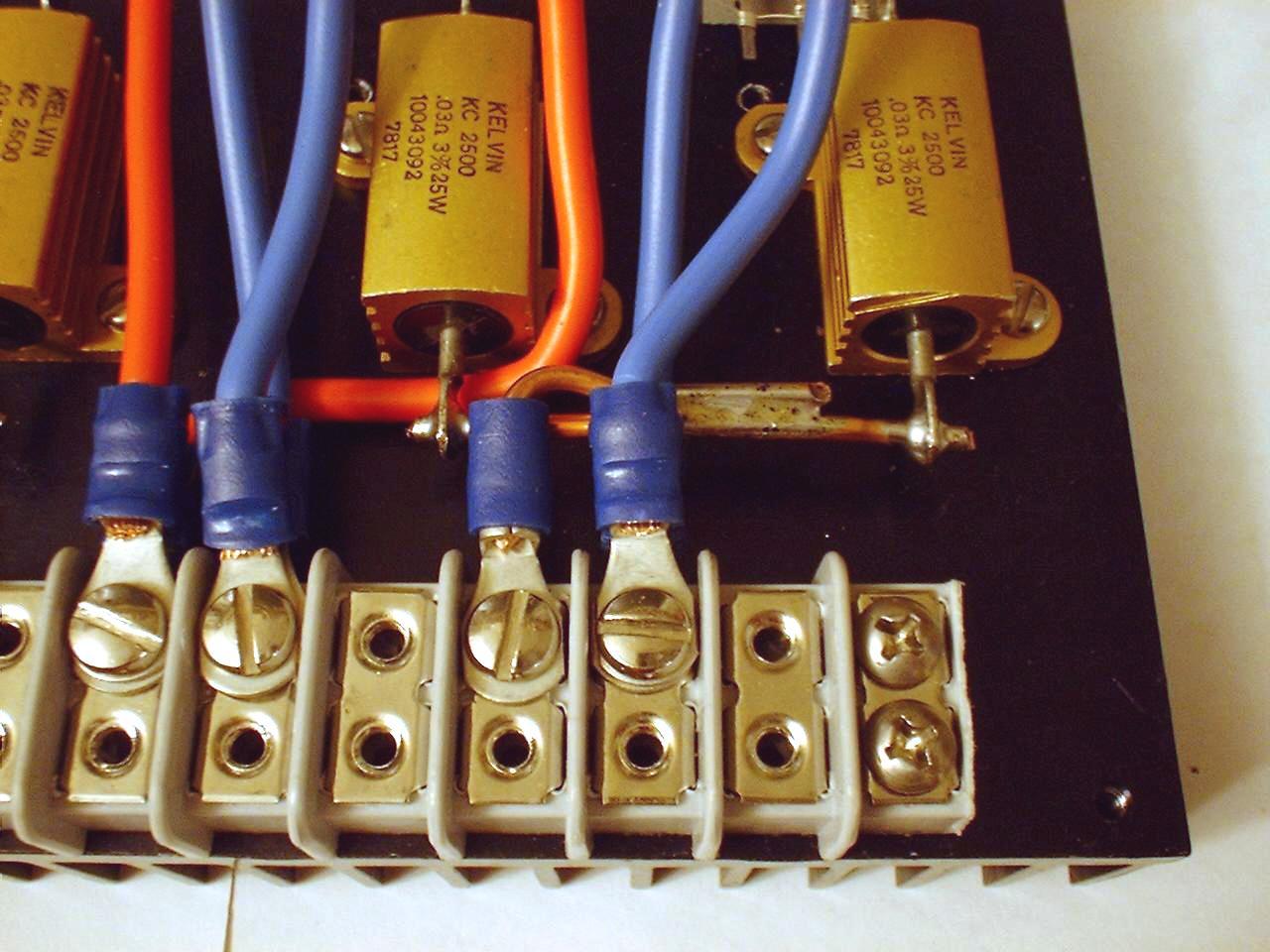
Update 02/21/01 - The MOSFETs are soldered on.
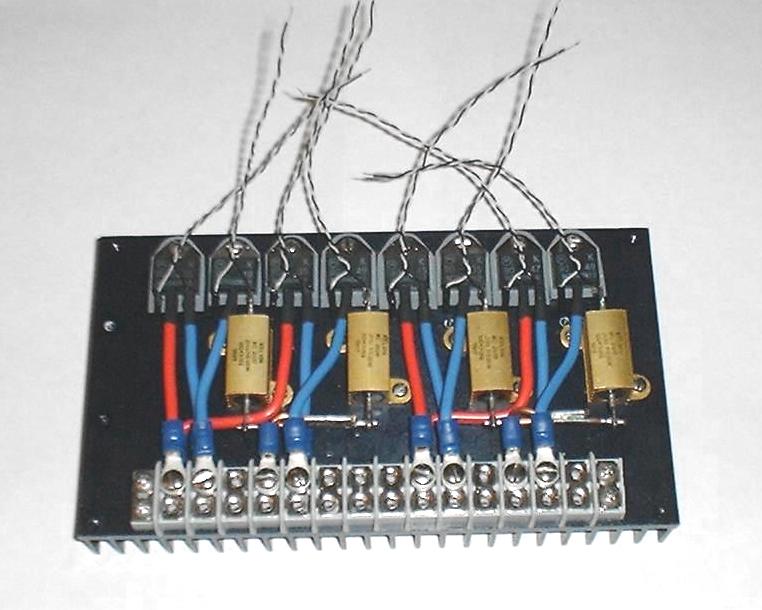
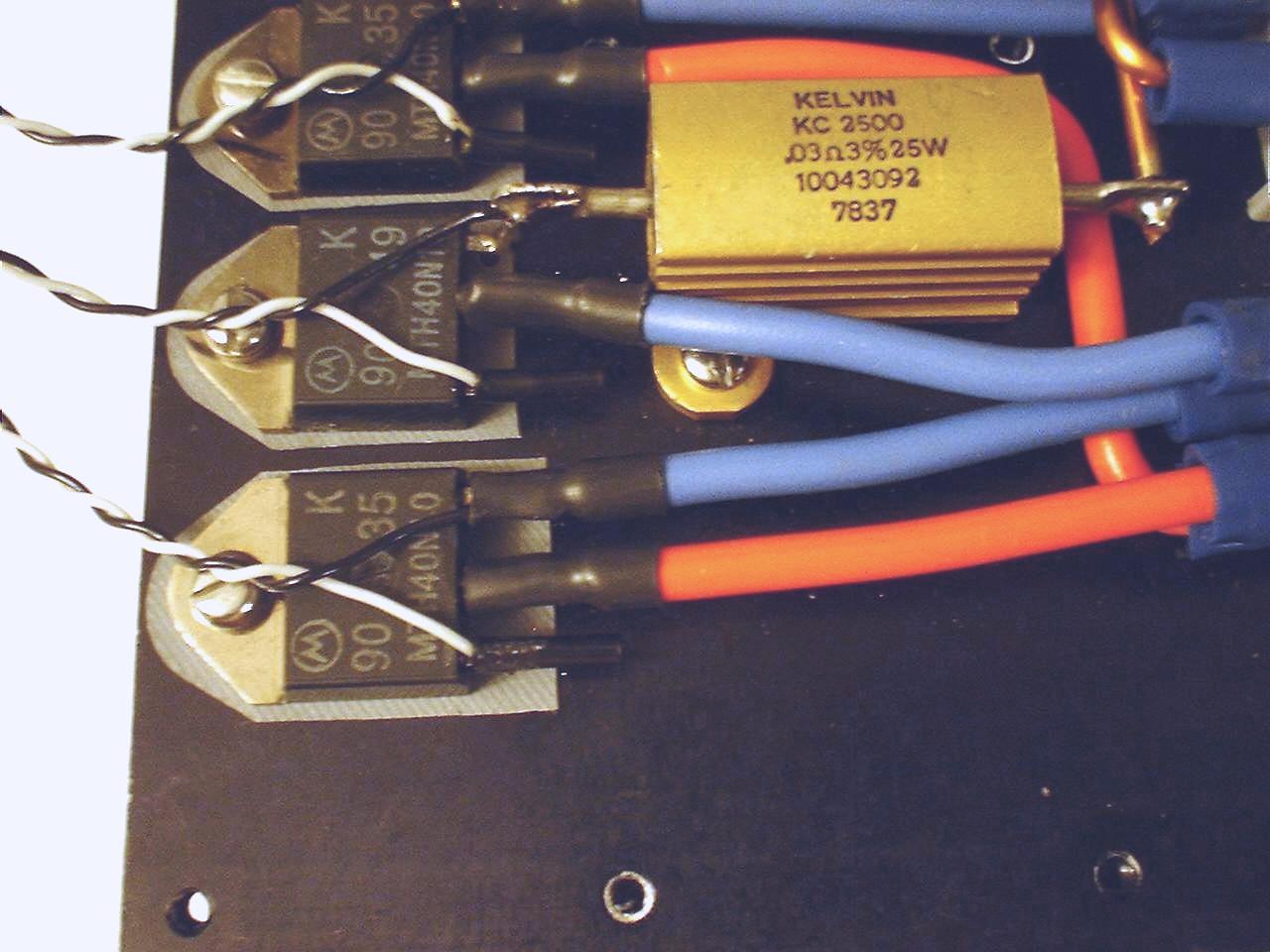
This is a picture of the finished heatsink assembly. You can see the twisted pair wires which will connect to the driver board. The closeup picture shows two transistors of a half bridge. You can see the heatshrink tubing I put over the MOSFET leads.
I ohmed it out and the meter reads inifinity. On the diodes setting the built-in diodes read .446 volts. So it looks like all the MOSFETs are good. That is a relief, since I bought them used...
So the next step is to build a driver board to control the gates of the MOSFETs.
Visit Twin Cities Robotics Group
Back to my Home Page http://www.pobox.com/~jsampson
This page is currently maintained by Jeff Sampson
{kind=link}